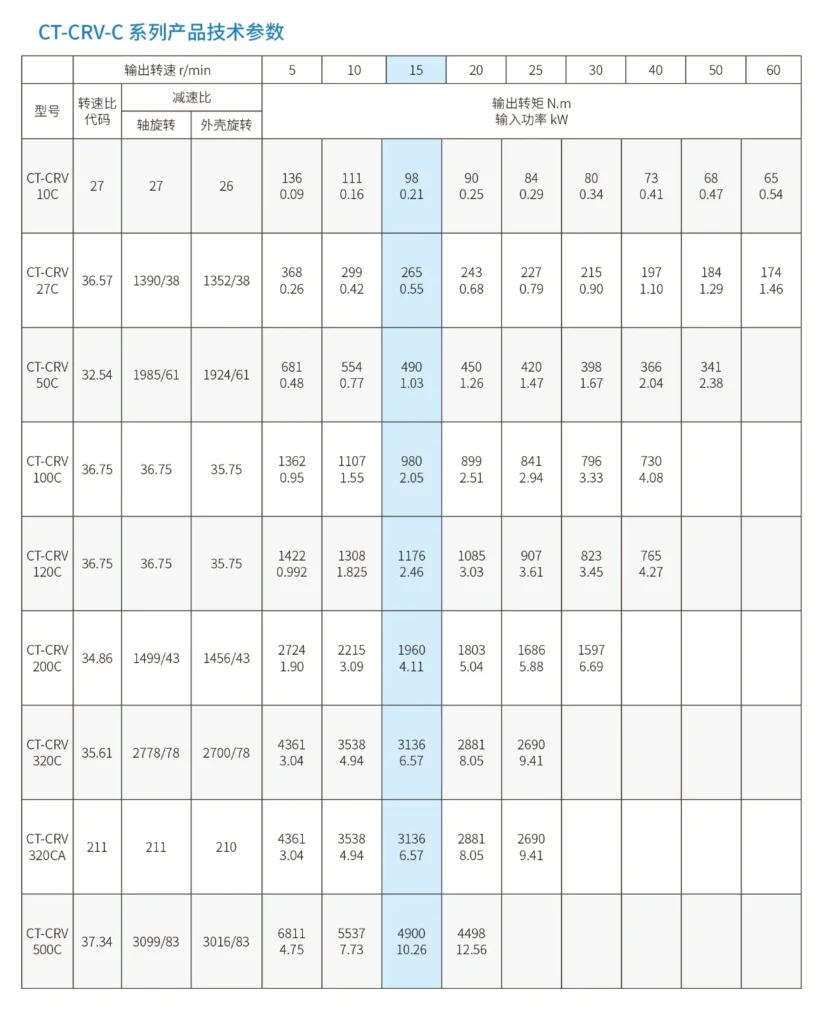
The high-precision cycloidal CT-CRV-C speed reducer for robotic applications is predominantly utilized in the articulation of industrial robots. It is a cycloidal pinwheel planetary gear reducer designed employing the principle of planetary gear engagement.
This type of speed reducer, during its operation, exhibits characteristics such as a multitude of engaging gear teeth, minimal clearance, and reduced vibration and inertia. It is endowed with attributes like compact size, lightweight, high rigidity, and the capacity to withstand overloads. These features ensure the stable operation of the robot and enable it to achieve exceptional levels of transmission and positioning accuracy.